2024
Noel Csomay-Shanklin, William D. Compton, and Aaron D. Ames
Submitted to ICRA 2025
Noel Csomay-Shanklin, and Aaron D. Ames
Submitted to ACC 2025
Max H. Cohen, Noel Csomay-Shanklin, William D. Compton, Tamas G. Molnar, and Aaron D. Ames
Submitted to LCSS 2025
William D. Compton, Noel Csomay-Shanklin, Cole Johnson, and Aaron D. Ames
Submitted to ICRA 2025
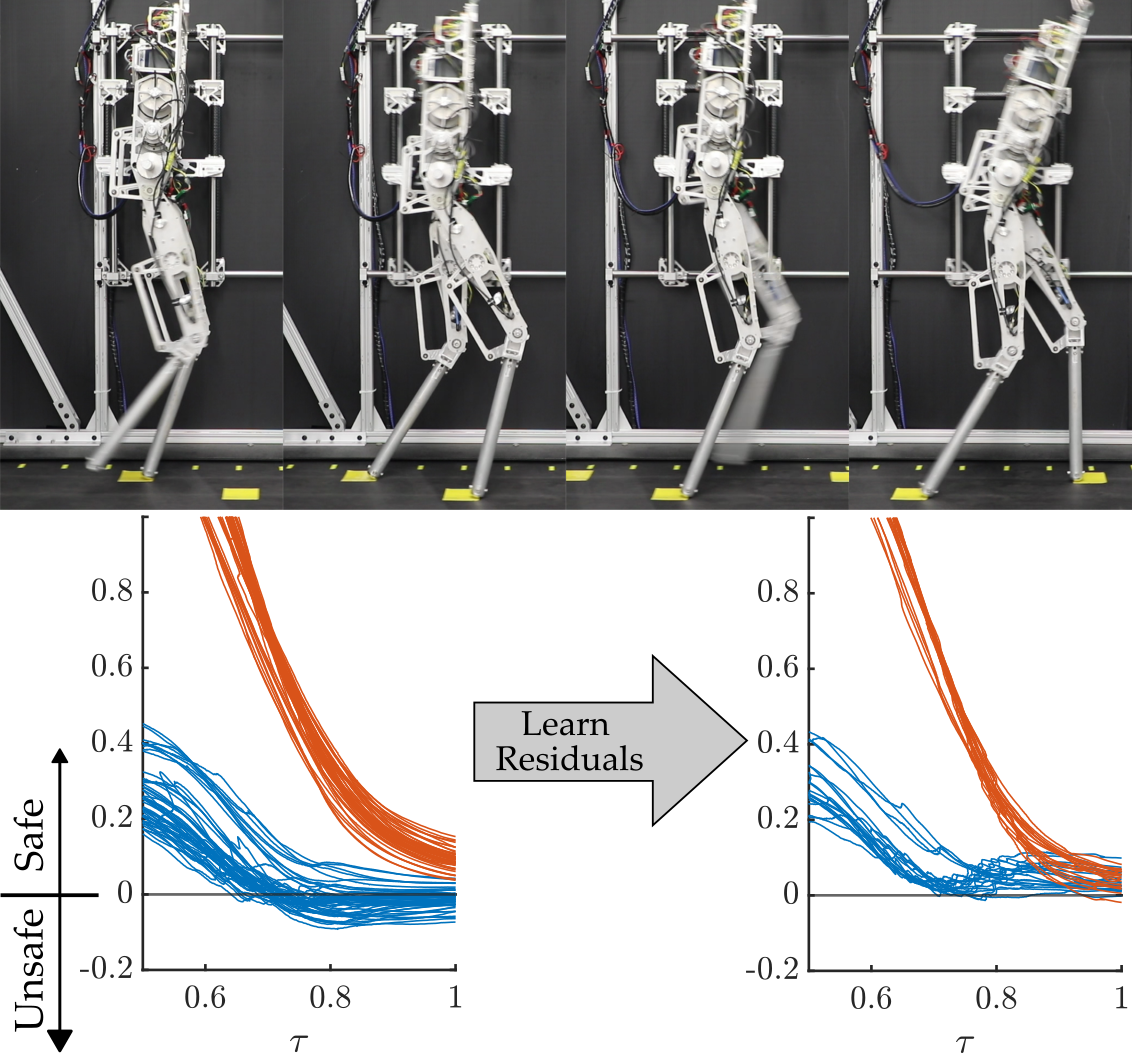
Noel Csomay-Shanklin*, William D. Compton*, Ivan Dario Jimenez Rodriguez*, Eric R. Ambrose, Yisong Yue, and Aaron D. Ames
IROS 2025
William D. Compton*, Ivan Dario Jimenez Rodriguez*, Noel Csomay-Shanklin*, Yisong Yue, and Aaron D. Ames
CDC 2024
Inigo Incer, Noel Csomay-Shanklin, Aaron D. Ames, and Richard M. Murray
LCSS 2024
Wyatt Ubellacker, Noel Csomay-Shanklin, and Aaron D. Ames
ACC 2024
2023
Noel Csomay-Shanklin, Victor D. Dorobantu, and Aaron D. Ames
ICRA 2023
Maegan Tucker, Noel Csomay-Shanklin, and Aaron D. Ames
ICRA 2023
2022
Noel Csomay-Shanklin*, Andrew J. Taylor∗, Ugo Rosolia, and Aaron D. Ames
CDC 2022
Manuel Y. Galliker*, Noel Csomay-Shanklin*, Ruben Grandia, Andrew J. Taylor, Farbod Farshidian, Marco Hutter, and Aaron D. Ames
Humanoids 2022

Jared Li, Bharat Kanwar, Theodore Johnson, Jonathan Meditz, Avery Yang, Noel Csomay-Shanklin, Joshua Bishop, Dean Molinaro, and Aaron J. Young
2022
Noel Csomay-Shanklin, Maegan Tucker, Min Dai, Jenna Reher, and Aaron D. Ames
ICRA 2022
Ivan Dario Jimenez Rodriguez*, Noel Csomay-Shanklin*, Yisong Yue, and Aaron D. Ames
L4DC 2022
Yuxiao Chen, Ugo Rosolia, Wyatt Ubellacker, Noel Csomay-Shanklin, and Aaron D. Ames
RA-L 2022
2021

Yu Sun, Wyatt L. Ubellacker, Wen-Loong Ma, Xiang Zhang, Changhao Wang, Noel Csomay-Shanklin, Masayoshi Tomizuka, Koushil Sreenath, and Aaron D. Ames
RA-L 2021
Wyatt L. Ubellacker, Noel Csomay-Shanklin, Tamas G. Molnar, and Aaron D. Ames
IROS 2021
Maegan Tucker, Noel Csomay-Shanklin, Wen-Loong Ma, and Aaron D. Ames
ICRA 2021
Noel Csomay-Shanklin*, Ryan K. Cosner*, Min Dai*, Andrew J. Taylor, and Aaron D. Ames
L4DC 2021
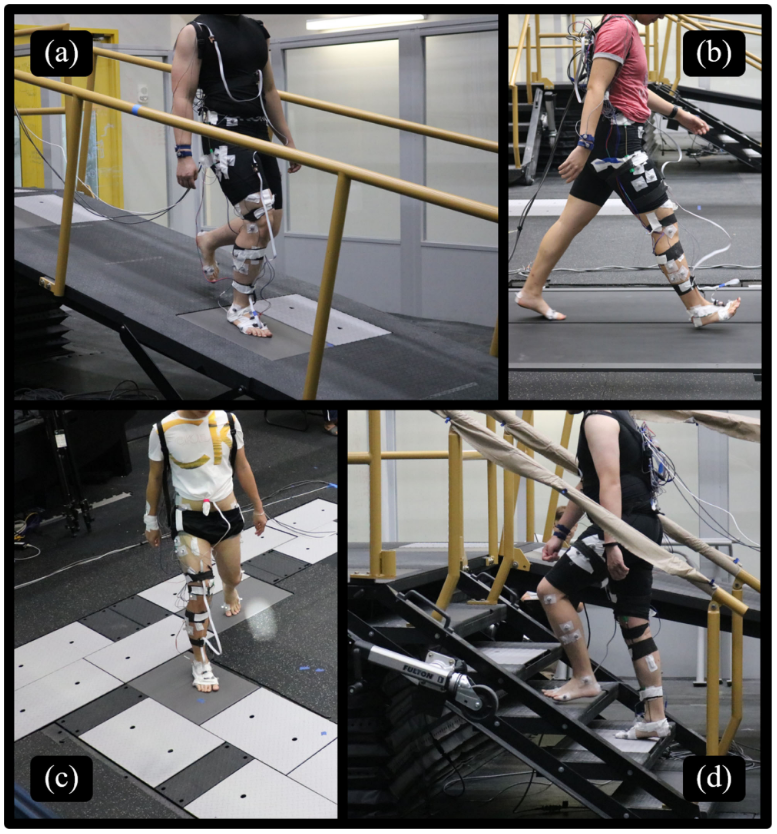
Jonathan Camargo, Will Flanagan, Noel Csomay-Shanklin, Bharat Kanwar, and Aaron Young
Transactions on Biomedical Engineering 2021
Wen-Loong Ma, Noel Csomay-Shanklin, Shishir Kolathaya, Kaveh Akbari Hamed, and Aaron D. Ames
RA-L 2021
2020

Wen-Loong Ma, Noel Csomay-Shanklin, and Aaron D. Ames
IROS 2020
Jonathan Camargo, Aditya Ramanathan, Noel Csomay-Shanklin, and Aaron Young
Computer Methods in Biomechanics and Biomedical Engineering 2020
Jenna Reher*, Noel Csomay-Shanklin*, David L. Christensen, Bobby Bristow, Aaron D. Ames, and Lanny Smoot
ICRA 2020
Wen-Loong Ma, Noel Csomay-Shanklin, and Aaron D. Ames
L-CSS 2020
2019
Eric Ambrose, Noel Csomay-Shanklin, Yizhar Or, and Aaron D. Ames
IROS 2019
Mircea Badescu, Paul Backes, Scott Moreland, Alexander Brinkman, Dario Riccobono, Matthew Dotson, Noel Csomay-Shanklin, Samuel Ubellacker, Jamie Molaro, Mathieu Choukroun, and Giancarlo Genta
Aerospace Conference 2019